Obstacle Avoidance for UAV
Description
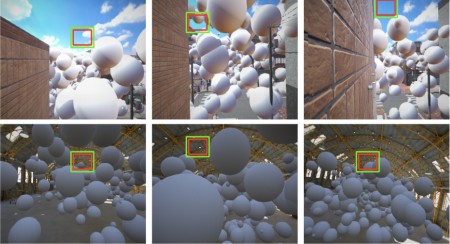
In this project, a ResNet-based architecture was trained with single instances of RGB images to predict traversable paths for a UAV. The images, obtained from the DodgeDrone Simulation environment, were labelled in self-supervised way by taking the maximum average depth of the patch as a criterion. The model was fed with positive examples of obstacle-free patches (in green). The idea of the project is to avoid obstacles during navigation by moving the UAV towards the center of the predicted patch (in red).
Ongoing and future works include the following:
- Using the center of the patch to obtain linear velocity commands through Radial Flow.
- Integrating the network with Habitat Simulation for end-to-end high-level control.